
Merged
Showing
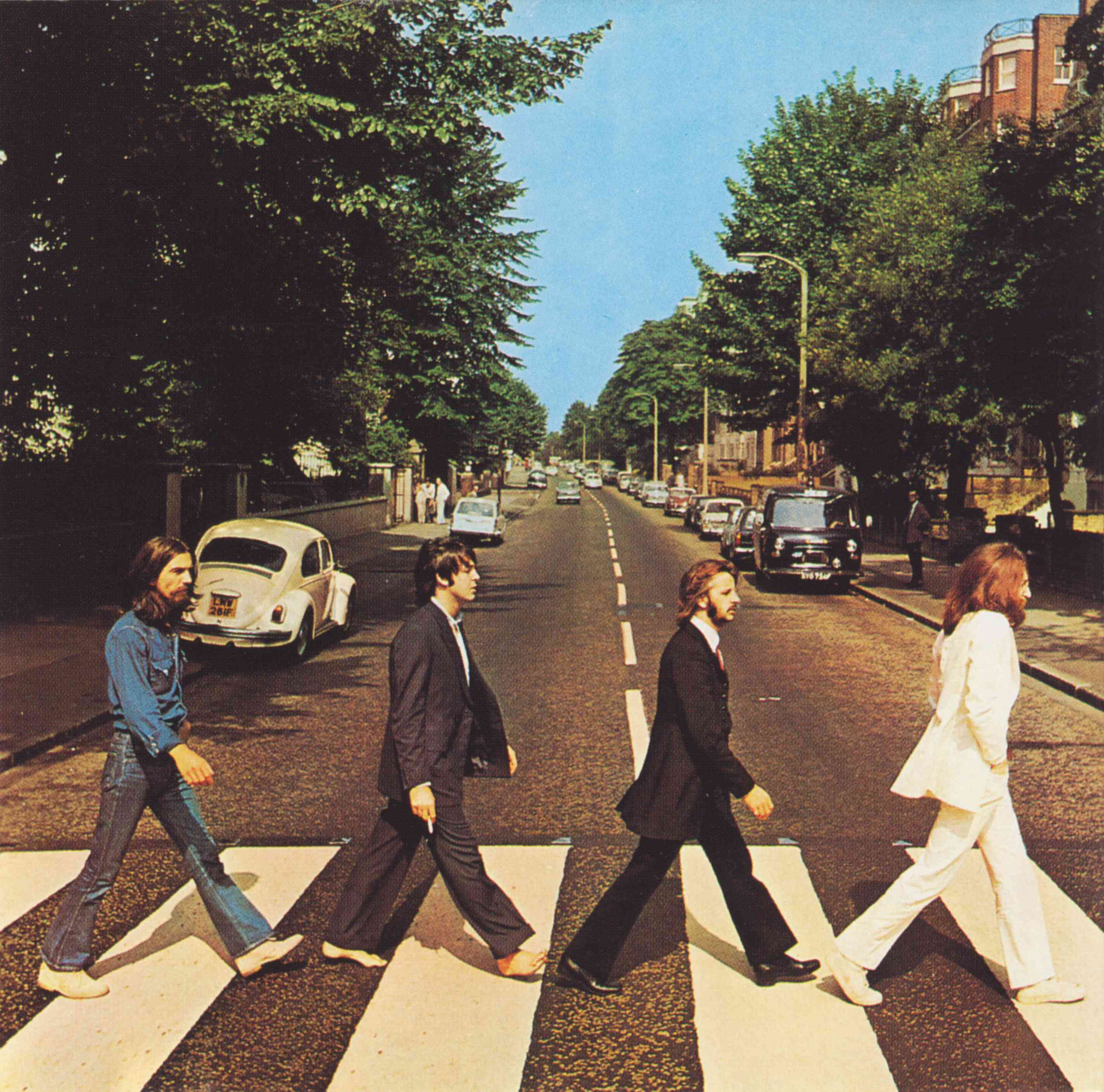
images/patterns/abby.jpg
0 → 100644
{kind=link}
485 KB
images/patterns/cake.jpg
0 → 100644
{kind=link}

41.3 KB
images/patterns/cola.jpg
0 → 100644
{kind=link}

74.4 KB
images/patterns/flag.jpg
0 → 100644
{kind=link}

263 KB
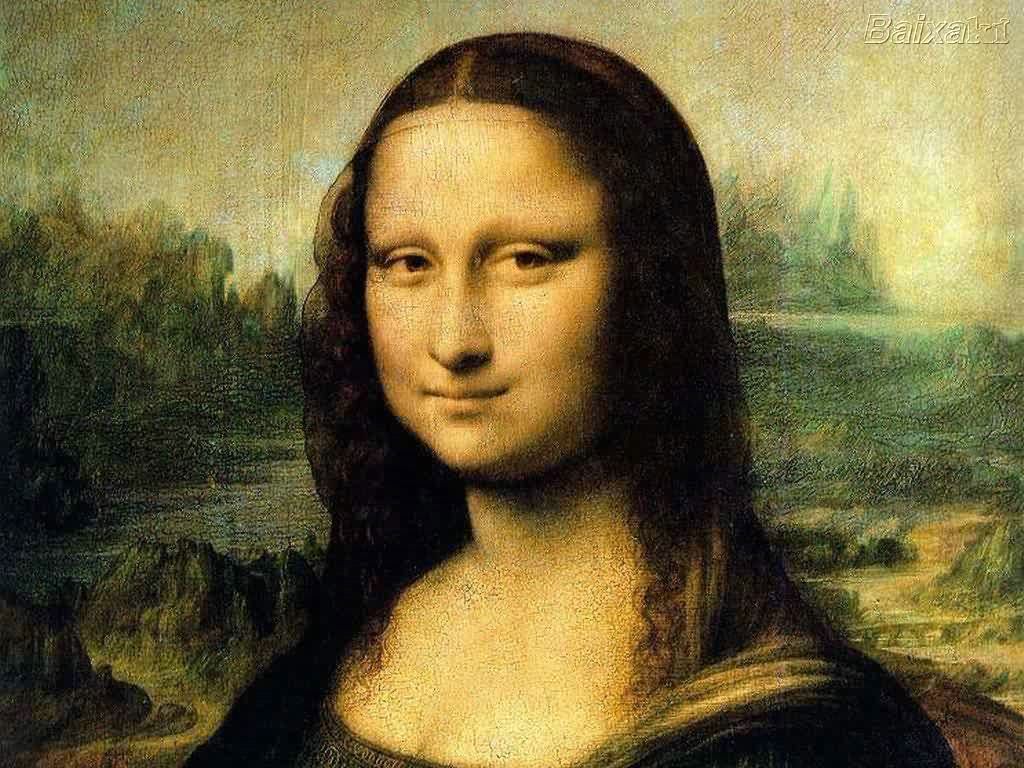
images/patterns/mona.jpg
0 → 100644
{kind=link}
157 KB
images/patterns/sign.jpg
0 → 100644
{kind=link}

489 KB
images/patterns/supa.png
0 → 100644
{kind=link}

226 KB
images/patterns/turm.jpg
0 → 100644
{kind=link}

289 KB
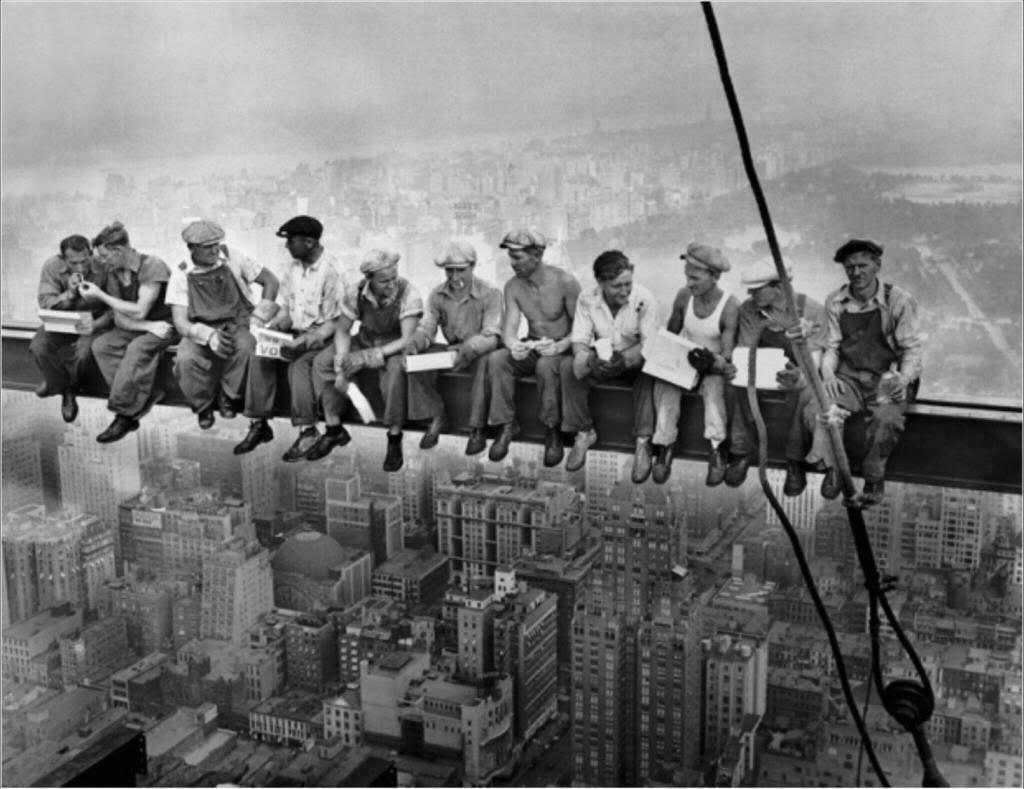
images/patterns/work.jpg
0 → 100644
{kind=link}
206 KB