- Fetch the latest CentOS 7 iso from here: http://isoredirect.centos.org/centos/7/isos/x86_64/CentOS-7-x86_64-DVD-1810.iso
- Make a bootable USB stick out of the iso e.g. following this guide https://linuxize.com/post/how-to-create-a-bootable-centos-7-usb-stick/.
- Boot the target device from the stick. <br>
**Example:** On the *Panasonic Toughpad FZ-M1* you can do that by entering the BIOS menu by holding delete on an attached USB keyboard or pressing all hardware buttons around the power button during boot. Once inside the BIOS switch to the Exit tab using the arrow keys or the touchscreen. And select your previously created and plugged in USB stick under Boot device override. Attaching a Keyboard and mouse to the device to follow this guide is recommended. <br>
**Note:** On the *UAV Components Micronav* https://www.uavcomp.com/command-control/micronav/ device:
1. The setup of CentOS will not start with the default configuration. To solve this go to the BIOS menu like explained in the example above. Disable the "Extension Port" device under the "Advanced" tab. "Exit and save" the BIOS menu on the Exit page of the BIOS and try again. After CentOS is installed, you can enable the device back again such that the microhard network works.
2. Make sure to never do a warm reboot but always first shut down the device if you want to reboot into Linux. Otherwise the microhard network adapter is not working properly and slows down the whole system.
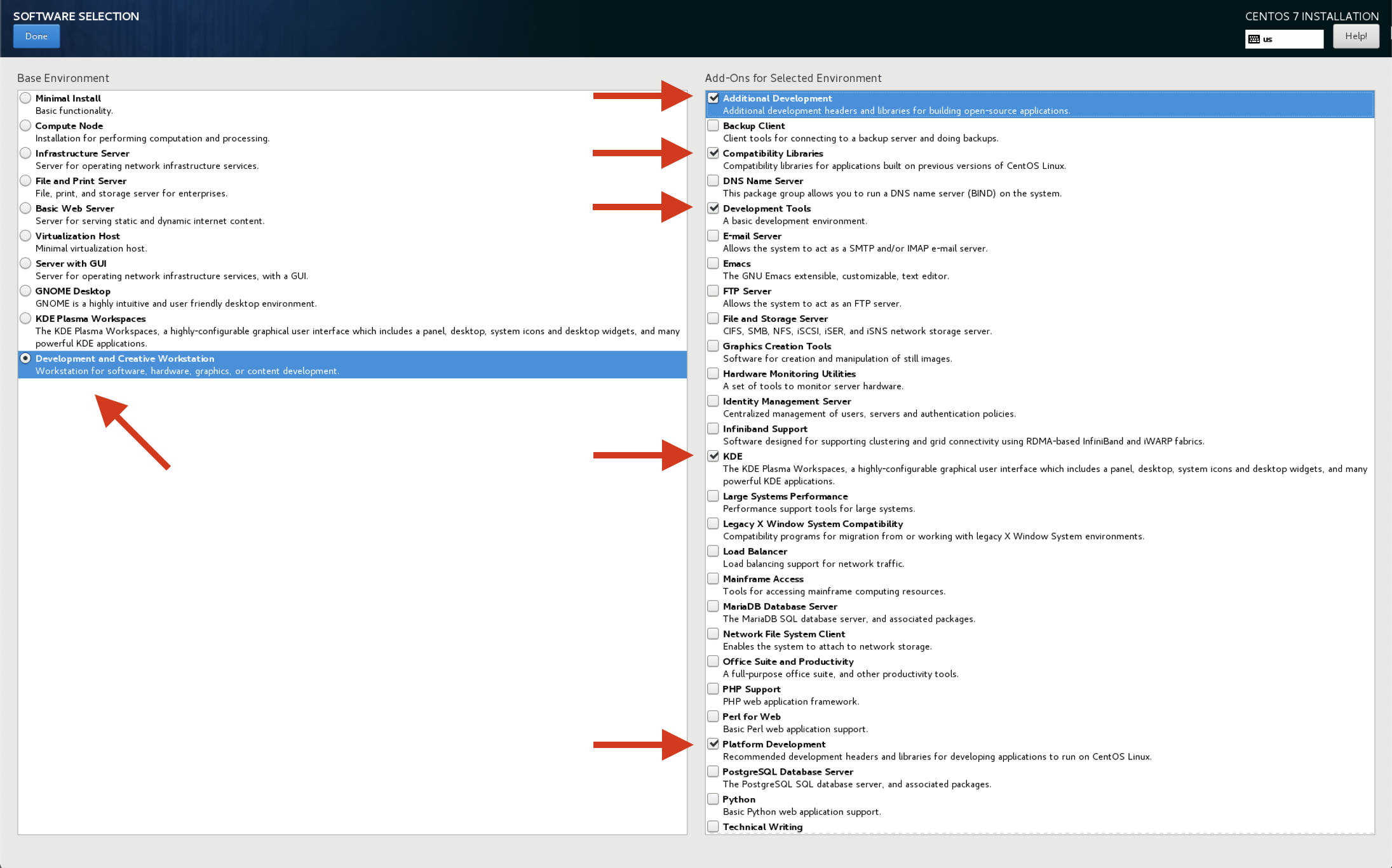
## CentOS Software Selection Installation Options
These were the options used to setup a CentOS development system. Use it as a guideline.
Once CentOS is installed and booted we need to set up the environment for QGC. First, we need to update GStreamer to a more recent version. This guide follows Alice Wonder's tips found here: https://media.librelamp.com
**Note:** Make sure these are installed (vaapi for Intel GPUs)
```
sudo yum install gstreamer1-vaapi
sudo yum install gstreamer1-libav
```
## Installing SDL2
SDL2 is used for joystick support.
```
sudo yum install SDL2 SDL2-devel -y
```
## Update Kernel to support all USB Joysticks
Chances are that your USB Joystick does not get recognized under CentOS. In our tests the following joysticks did not work out of the box:
- Logitech F310
- Microsoft Xbox controller (USB)
If your Joystick gets recognized fine and shows up as `/dev/input/js0` when you run the command `/dev/input/*` you can skip this step.
To fix the joystick not being recognized even if the same unit is working under Windows or Ubuntu please follow this guide to update the kernel: https://www.howtoforge.com/tutorial/how-to-upgrade-kernel-in-centos-7-server/
Here's a short summary of the commands that you need to execute to update the kernel:
Reboot your deivce afterwards and make sure the new kernel version shows up as the default start option in the GRUB menu on boot.
# Running QGC on CentOS
Before launching QGC, you need to make sure the current user has access to the dialout group (serial port access permission):
```
sudo usermod -a -G dialout $USER
```
## Firewall
The default firewall security level of red hat distributions like CentOS block the MAVLink communication and also the camera video stream. So you need to create rules to open the incoming ports for MAVLink and camera stream. For non-production local environment testing purposes ONLY you can temporarily disable the firewall using the command (see https://www.liquidweb.com/kb/how-to-stop-and-disable-firewalld-on-centos-7/):
Temporary
```
systemctl stop firewalld
```
Permanent (at your own risk)
```
systemctl disable firewalld
```
Undo permanent change
```
systemctl enable firewalld
```
## Connection problems with multiple networks
In our test with CentOS we had problems when connecting to multiple networks through multiple network devices even with appropriate IP adress and subnet assignment. Issues consisted of:
- Losing internet access when connecting to a second network
- Having flacky connection to the vehicle with a lot of hickups and packet losses (e.g. 30 seconds perfect connection 4 seconds of packet loss in a regular pattern)
If you face any of these problems avoid them by only connecting one network at a time e.g. switching between WiFi and microhard.
## Executing a Prebuilt QGC Binary
- Get hold of an archive containing a prebuilt binary of QGC for CentOS. At the moment there is no automatic deployment for this build if you urgently need one get in touch with the developers.
- Unpack the archive. (More details: https://www.hostdime.com/kb/hd/command-line/how-to-tar-untar-and-zip-files).
- Go inside the unpacked files and locate the script named `qgroundcontrol-run.sh`
- Run it by executing the command
```
./qgroundcontrol-run.sh
```
# Building QGC on CentOS
## Installing Qt
```
mkdir ~/devel
cd ~/devel
```
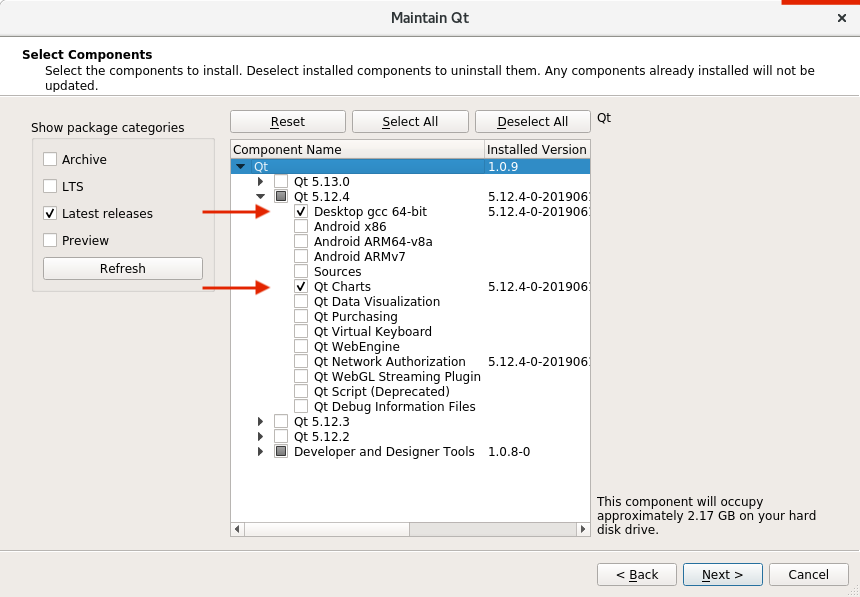
Install Qt 5.12.4 from the Qt installation script which can be downloaded [here](https://www.qt.io/download-thank-you?os=linux&hsLang=en). Once downloaded, make it executable and run it:
```
chmod +x qt-unified-linux-x64-3.1.1-online.run
./qt-unified-linux-x64-3.1.1-online.run
```
Select the following options and install it under ~/devel/Qt
You can alternativelly launch QtCreator (found under `~/devel/Qt/Tools/QtCreator/bin/qtcreator`), load the `qgroundcontro.pro` project and build/debug from within its IDE.
By default, this will build the regular QGC. To build the sample, customized UI version, follow [these instructions](https://github.com/mavlink/qgroundcontrol/blob/master/custom-example/README.md).
This information has moved to the [QGroundControl Developer Guide](https://dev.qgroundcontrol.com/en/getting_started/CentOS.html).

{kind=link}

{kind=link}
{kind=link}